Roadwork Robot Autonomously Digs Out, Repairs Buried Utility Lines

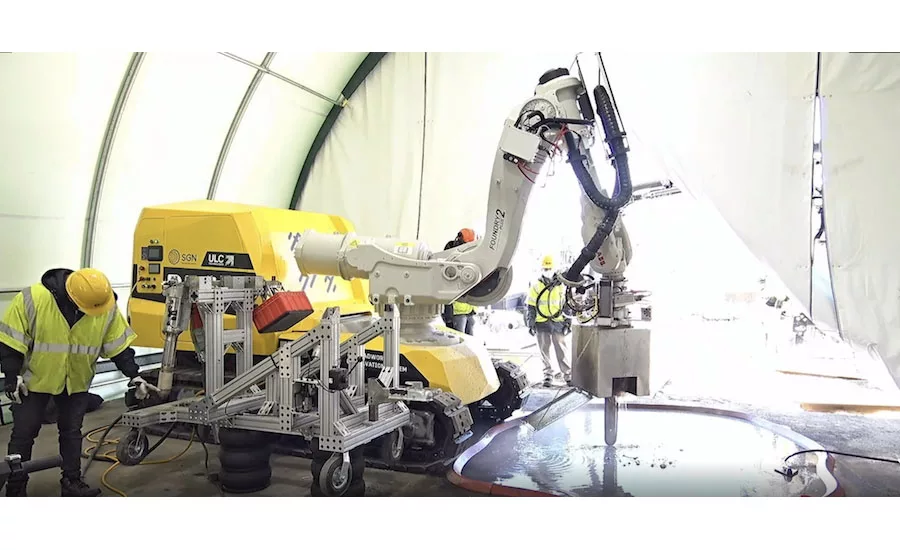
The RRES robot from ULC Technologies uses interchangeable tools on robotic arm to perform all of the tasks necessary to excavate gas lines from beneath roadways, perform work on the line, and then rebury it. It is seen here with the ground-penetrating radar attachment its uses during its initial site assessment.
Photo Courtesy of ULC Technologies

In order to cut a keyhole in the roadbed, the RRES uses a custom electric chainsaw. Water to reduce dust is supplied via an external house. The chainsaw is powered by the robot's onboard lithium-ion batteries.
Photo Courtesy of ULC Technologies
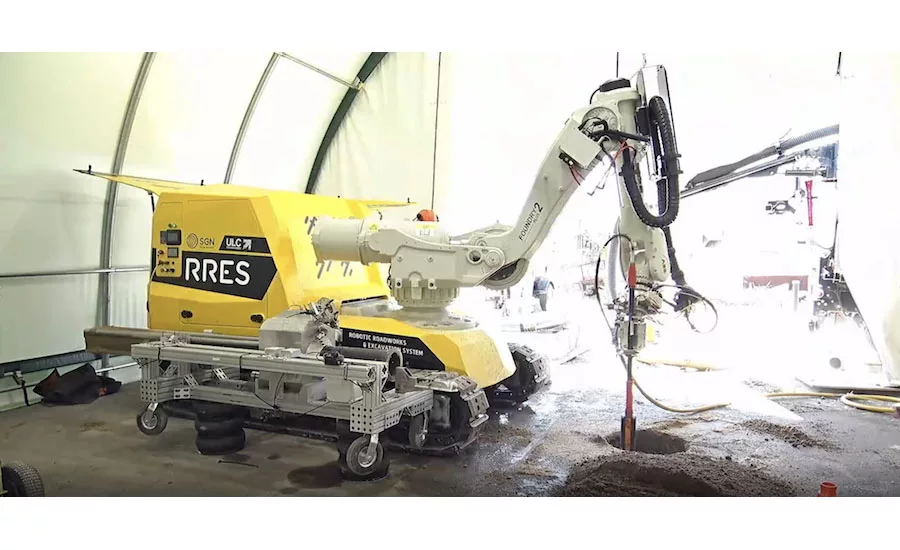
The RRES prototype works on a test pavement during a demonstration for the industry press. Operators are mostly hands off during the process, but are needed to change out the attachments on robot's tool cart. While the demonstration was performed in a tent, ULC Technologies representatives say the robot is capable of working in all weather, a requirement that U.K. gas utility SGN had set during development.
Video Still Courtesy of ULC Technologies

The RRES removes the pavement core using a pneumatic vacuum system. The robot can lift the core up to 3 meters (approx. 9.8 ft) above the its base, provided the core weighs less than 225 kg (approx. 496 lb).
Once work on the underground utility is complete, the RRES can compact the soil back down layer-by-layer, as human operators shovel it in the hole.
Video Still Courtesy of ULC Technologies
Accessing subsurface utilities buried beneath a roadway can sometimes be a two or three-day effort involving multiple lane closures and heavy equipment. Looking to minimize that scenario and to accelerate an ongoing overhaul of the U.K.’s second-largest gas distribution network, gas utility SGN has been investing in the development of the autonomous RRES roadworks robot from ULC Technologies.
Short for Robotic Roadworks and Excavation System, the RRES is a stand-alone, battery-powered robot that can autonomously perform the complex tasks required to excavate, repair and rebury gas lines situated beneath paved roadways. Now undergoing trials in the U.K. through the spring and summer, SGN and ULC see the RRES as the future platform for work on all kinds of underground utilities.
“It enhances safety for us,” says Ollie Machan, SGN’s project lead for RRES, during a demonstration the robot for industry press on April 13. “For the first time, this is a fully autonomous robot operation, totally hands off.”
Aside from a pair of human operators to keep an eye on the robot and change out its tool cart as it moves through the different steps of the process, human interaction is minimal, which Machan says is a huge boost to safety. “RRES takes the operator out of the excavator, so if anything happens with the gas or electric, we’ve already taken them out of [danger].”
The RRES system seems straightforward at first glance. A robotic arm with six degrees of articulation sits on a track-mounted platform that houses the robot’s lithium-ion battery pack and onboard computer. Tools for different stages of the excavation are swapped out automatically from attached tool carts. But what sets the RRES apart from machine-control-enabled heavy equipment or sophisticated power tools is its focus on total autonomy.
“Three years ago we started this project with an ambitious goal,” recalls Ali Asmari, R&D project manager and head of AI and machine learning at ULC Technologies. “To do everything with excavation: identify buried assets, find buried assets and excavate soil above those assets, all with less involvement from a human. The robot can install a fitting on a gas pipe, and once the operation is done, it can restore material into the keyhole [excavation] and cap it.”
Currently a working prototype, the RRES uses a combination of custom tools and some fairly sophisticated AI-based learning to navigate the excavation site and perform its tasks. Able to work in inclement weather as well as on an incline, the RRES begins by assessing the site with a ground-penetrating radar attachment. Once a scan is complete, the RRES generates a point cloud of the area beneath the road surface, which an operator can then manually edit and clean up on a computer to zero in on the targeted subsurface utility line.
Looking for quick answers on construction and engineering topics?
Try Ask ENR, our new smart AI search tool.
Ask ENR →
Once the robot has the point cloud loaded, it goes to work on the pavement. Using a pneumatic quick tool changer at the end of its arm, it swaps the radar unit for a core drill to take an exploratory sample of the roadway. Once it confirms the depth and condition of the pavement, the RRES switches to a custom 35-hp electric chainsaw. All of the robot’s tools are powered by its onboard 35kW-hour lithium-ion phosphate batteries, with a converter to change DC power to three-phase AC. This is the same type of power that a robotic arm would typically have access to in a factory setting, explains Asmari.
The RRES uses the chainsaw to cut a circular keyhole in the roadway, using pressure sensors to assess when a plunge cut has gone deep enough. The RRES can cut a variety of shapes, including an elongated oval up to 36 in. in dia. The pavement “core“ is then lifted out of the hole using a pneumatic tool that can lift the core up to 3 meters (approx. 9.8 ft) above the robot’s base, provided it weighs less than 225 kg (approx. 496 lb). Connections for the pneumatic lifter’s air hose, the chainsaw’s water hose and the radar’s coaxial data cable are all handled autonomously during each tool change.
Excavation of the soil beneath the roadway is done via supersonic air nozzles attached to a vacuum hose, which break up the soil and draws it out of the hole. The robot performs this task within a box frame to prevent spillage outside the work area. “Every time [the nozzles] agitate it, the vacuum removes the soil,” says Asmari. “We have a force sensor at the end, so if [the RRES] comes in contact with the asset below ground, it will retract and allow the operator to go look in.” Aside from changing out the tool carts and performing maintenance tasks such as tightening the chainsaw’s blade, operators will also be on hand to inspect the robot’s work and confirm its progress before it moves onto the next task.
For this first prototype, Asmari and his team focused on use cases for SGN’s gas network, and has equipped the RRES with the means to clean a standard gas pipe, clamp it, make a cut and then install a thermoplastic fitting. But it is not uncommon for there to be electrical cables or other sensitive utilities near gas lines, so the operation is designed to reduce the chance of accidental strikes, adds Asmari. “These [pipe-handling attachments] have pneumatic motors. We try to stay away from any electromagnetic field around tools,” he explains.
After work on the exposed pipe is complete, operators shovel the dirt back in the hole while the robot uses a compactor attachment to compact it layer by layer. Once finished, the RRES replaces the road pavement core as best as it can to restore the roadway to its previous condition.
“It pushes the core into the ground with a gentle downward force, wiggles the core around, finding the smoothest orientation to push back into spot,” says Asmari, noting this is only one of the specialized tasks his team had to custom-build for the RRES. “We’re designing things that have never been done before,” he adds.
According to ULC, the RRES’s battery pack charges in three to four hours, and offers eight hours of non-stop operation on a single charge. In terms of time spent on the site, ULC says the RRES can scan and identify an excavation site in 20 minutes, cut and remove a core in 45 minutes, and fully excavate a utility in about 20 minutes. Asmari says ideally the RRES could perform two to three successful operations in a single day. The robot has a working depth of about 6 ft, and the entire RRES platform is only 10 ft by 6 ft, small enough to work in a single road lane.
Taking an articulated robotic arm off of a factory floor and putting it to work on the road took more than hardening it against the weather, explains Asmari.
“Putting the [RRES] in an unknown environment, giving it sensors, that was the biggest technical challenge,” he says. But the payoff is getting that factory-level of precision out in the field. “The robot has the same coordinate system for every tool it is using, it is aware of every point above and below ground,” says Asmari. “At all times an operator looking at the robot’s operation and can make sure it’s on mission. They can see the vitals, and can abort the mission at all times.”
The RRES is currently being tested on mock 30-ft-by-30-ft roadways meant to emulate the kind of roadbeds found in U.K. cities as well as U.S. cities such as New York. SGN made a $8.35-million initial investment in the development of the RRES, but the robot is not going to be used just for work on buried gas lines, says John Richardson, head of risk for SGN.
“We’re already doing parallel trials with Transport for London,” he notes, adding that the robot's arm can work with a variety of tools for different applications. “It’s not just for gas distribution networks, but all sectors. We’re also now looking for collaborative partners to develop this with [further].”



