Foldable Disaster-Rescue Robot Mimics a Cockroach
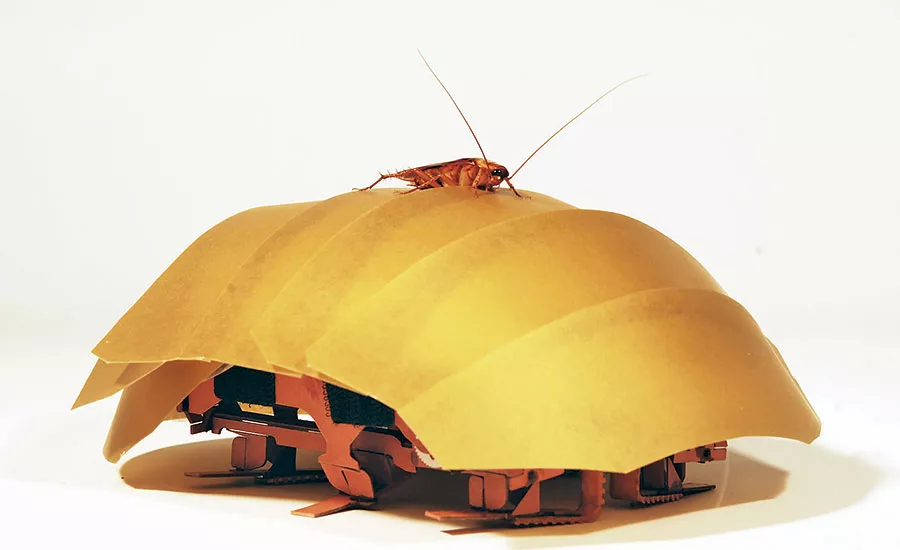
Prototype mimics the American cockroach. The robot can halve its height and crawl through cracks as small as 1.4 in.
PHOTO COURTESY OF POLYPEDAL LAB, UNIVERSITY OF CALIFORNIA, BERKELEY
Researchers from the University of California at Berkeley and Harvard University have developed a working prototype of a robot that realigns its body to maneuver through tiny cracks to gather data.
“[The Federal Emergency Management Agency] told us there was a niche for small, first-responder robots that can go deep into rubble piles,” says Robert J. Full, professor of integrated biology at Berkeley, who worked on the project. “We built it and called it CRAM, for ‘compressible robot with articulated mechanisms.’ ”
And this robot crams, squeezing into spaces less than half its 3-in. height. It can move quickly through 1.4-in.-wide cracks and is robust enough to carry an assortment of sensors, such as a camera, mic, CO2 sensor or heat sensor, says Full.
In researching and observing the American cockroach, Full and his colleague found a new mode of locomotion they call “body-friction leg crawling,” wherein the insect’s only points of friction are on its belly and back, he says. Using the same technique, CRAM can squeeze through rubble to find disaster victims.
“Dogs are good at knowing survivors are around but can’t tell you where to dig for them,” says Full. But CRAM can pinpoint a buried survivor’s location deep in a pile of rubble.
Full says the robot, as a moving sensor, has potential for other uses, such as locating a column fracture by assessing its structural integrity. But Full stresses that this version is only a prototype and that his colleague is doing more research.
“We want to miniaturize it more,” says Kaushik Jayaram, a postdoctoral fellow in materials science and mechanical engineering at Harvard’s Wyss Institute. The current iteration is the length of a deck of cards. “We want to add climbing capabilities, as well,” he says.
Jayaram, too, says CRAM is a good fit for construction. For example, an inspector could identify cracks in a wall or corroding metal by having the robot, strapped to a camera, crawl through small gaps and pipes.
Looking for quick answers on construction and engineering topics?
Try Ask ENR, our new smart AI search tool.
Ask ENR →

