Updated Robot Dog Speeds Site Inspections

The latest version of Boston Dynamics’ robotic dog, Spot, can better manage complex payloads, including full laser-scanning equipment, to document as-builts on site.
PHOTO COURTESY BOSTON DYNAMICS
The latest version of Boston Dynamics’ robotic dog, Spot, can better manage complex payloads, including full laser-scanning equipment, to document as-builts on site.
PHOTO COURTESY HENSEL PHELPS
Boston Dynamics’ autonomous dog-shaped robot, Spot, is known for its ability to traverse complex terrain and is now being used by construction companies for inspections and LiDAR site scans. A new version of the robot, Spot 2.0, introduced May 6, expands these capabilities.
The older version was already useful on jobsites, says Eric Lessard, vice president, innovation and technology, at Pomerleau Inc., a construction and engineering firm based in Quebec. By using its 30-lb payload capacity and ability to learn a preprogrammed route, Lessard’s team has been testing Spot’s capacity to perform inspection tasks.
Lessard uses a remote control to walk Spot around the site and sets waypoints along the way. Spot’s autowalk feature allows it to revisit these exact waypoints autonomously, and it’s able to navigate around any new obstacles it encounters along the way, says Lessard.
“We tested the 360° camera linked to [site documentation app] HoloBuilder and are very pleased with the results,” says Lessard. Even with changing its battery every 90 minutes, Spot allowed the company to reallocate 20 hours per week of labor by letting the robot semi-autonomously take site documentation photos after work hours, he says.
|
Related Article |
“However, the distance between columns and walls on our [500,000-sq-ft] jobsite is too great for Spot to navigate using only its onboard cameras,” adds Lessard. So, his team added a LiDAR scanner to enhance the robot’s navigation abilities. But the low-resolution scans aren’t useful beyond navigation.
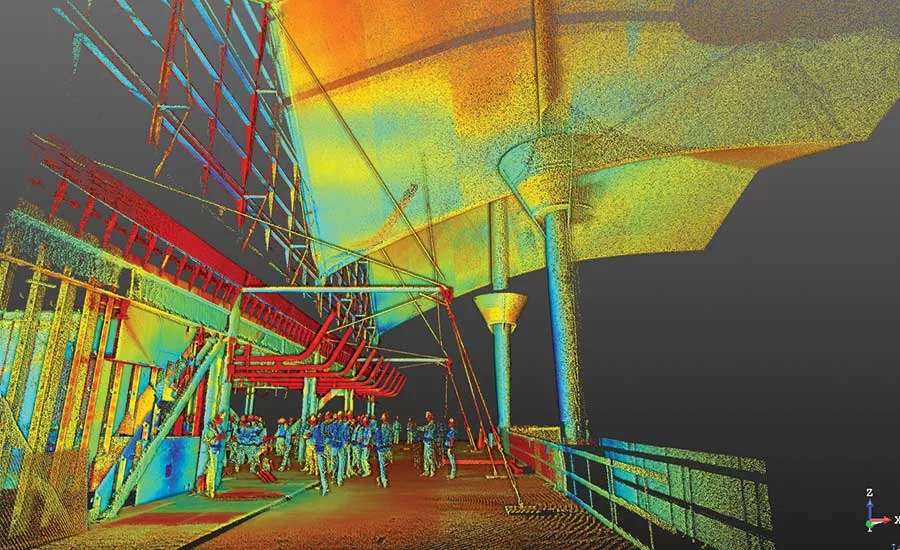
Construction firms are getting more granular in their data collection. By mounting a Trimble X7 3D scanner onto Spot, Hensel Phelps is collecting real site scans of its Denver International Airport renovation and comparing them to BIM, says Aviad Almagor, senior director, emerging technologies, at Trimble.
“With the X7 on its back, Spot can gather a point cloud with 2-mm accuracy for site documentation. If Spot isn’t perfectly level, the X7 has software-based leveling to account for plus or minus 5°,” says Almagor. “I can then align the point-cloud data with the BIM model and color them differently and compare the two.”
Looking for quick answers on construction and engineering topics?
Try Ask ENR, our new smart AI search tool.
Ask ENR →
This heat-map-style comparison helps the project team review newly-installed assets, resolve potential safety issues, identify deviations from existing as-builts and resolve visible design clashes, says Almagor.
When new technologies enter the jobsite there are always challenges, and Spot is no exception, says Lessard. “Snow turned out to be challenging for Spot, as the ground detected by its cameras was different than the actual depth where its legs would find support while walking,” he says. This kind of navigation issue is supposed to be addressed in the 2.0 model, which Lessard’s team is now testing on site.
Spot 2.0 is able to climb stairs in its autowalk mode, including metal-grate stairs and stairs without risers, says Brian Ringley, construction technology manager at Boston Dynamics. Spot 2.0 also has an improved API for easier data management and programming. “It allows users to upload premade navigation maps to Spot so it can autonomously walk a site after first being guided by remote control,” says Ringley.
Lessard says these updates will directly benefit construction. “Being able to use Spot easily on the stairs, getting navigation maps preloaded and having access to computation hardware for our sensors will let us do much more than what we are currently doing,” he says.


